原创度很低的一篇,整理了网络上这方面的资料,原链接在文中请自取。
PART I 初始化方法
1.为什么要调整权值初始化呢?
矩阵乘法是神经网络的基本数学运算。在多层的深度神经网络中,一个前向传递只需对该层的输入和权重矩阵执行矩阵乘法。这一层的乘积变成了下一层的输入,以此类推。
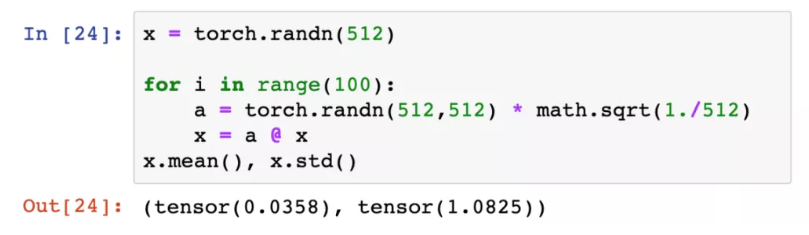
我们熟悉的权值初始化方法为标准正态分布初始化。现在设置一个输入x,设它为512维,由标准正态分布所产生。对应的每层权重矩阵512*512维,所有权值随机由标准正态分布生成。
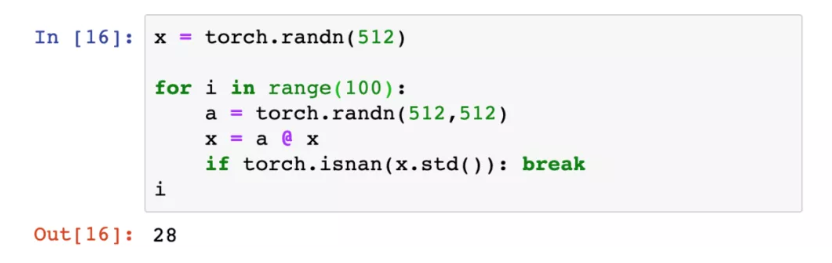
激活输出在29个网络层中爆炸,看来是我们设置的权值太大了。试着把权值缩小到标准差为0.01
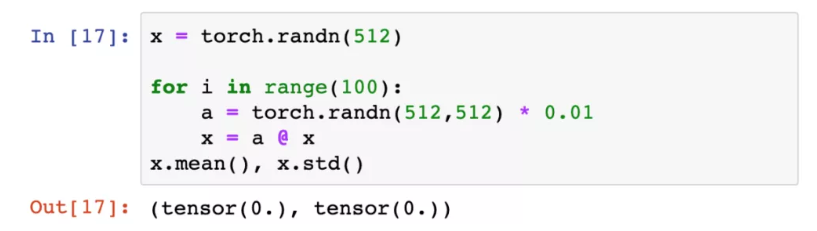
激活输出完全消失了。看来,初始的权值太大或太小,都会影响神经网络的训练。
2.寻找最佳权值的初探
对于上例的矩阵乘法,可以证明,平均而言,它的标准偏差是$\sqrt{512}$。
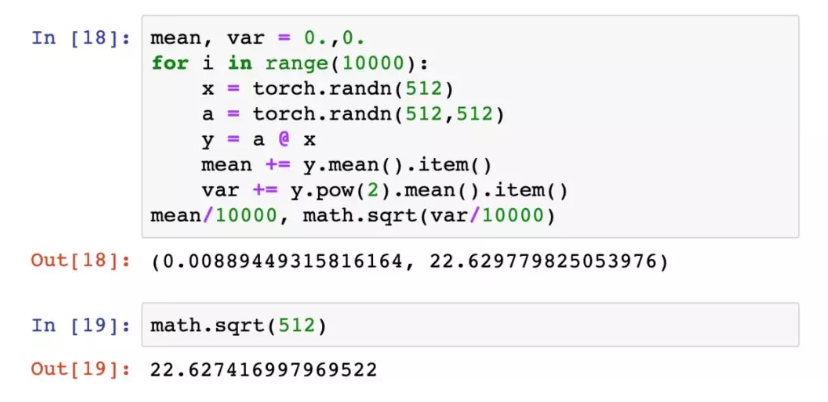
这样看来,下一层的输入数据的标准差将为$\sqrt{512}$,而且这个偏差在每一层都会不断累积,难怪29层时会有输出爆炸的现象了。为了避免这一点,我们把权重矩阵中的每个值都变为原来的$\frac{1}{\sqrt{512}}$,使得输出数据的标准偏差总是为1,这样就不会发生输出偏差的累积了。测试这个想法
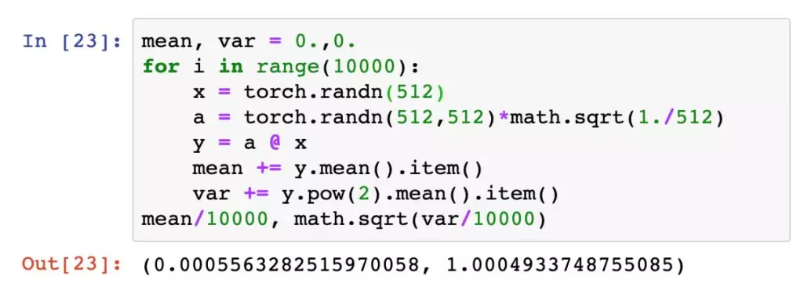
输出的偏差的确变为1了。用新的权值重新训练100层网络
成功!我们的层输出既没有爆炸也没有消失,即使在100个层之后也是如此。
3.Xavier初始化
以上,我们只是解决了问题的简单版本,但还没有考虑网络尾端的非线性激活函数。
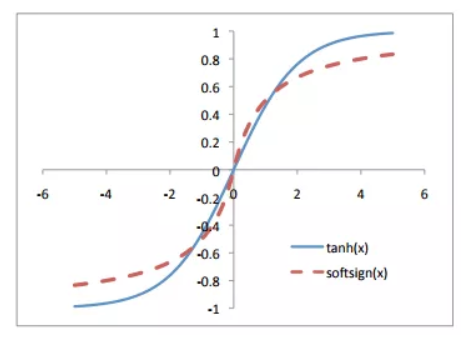
直到几年前,大多数常用的激活函数都是关于给定值的对称函数,其范围渐进地接近于与这个中点正负一定距离的值。双曲正切函数和softsign函数就是这类激活函数的典型的例子。
在我们假设的100层网络的每一层之后添加一个双曲正切激活函数,然后看看当我们使用上面得到的权值初始化方案时发生了什么。
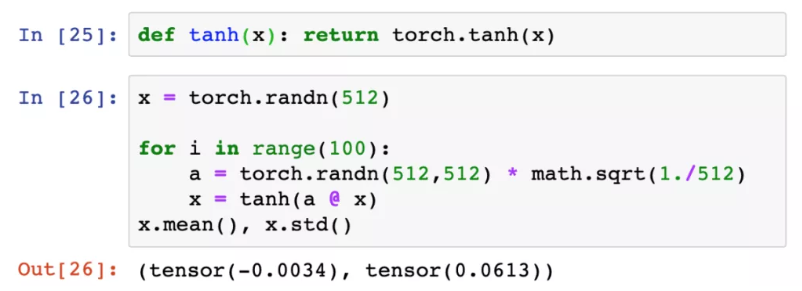
第100层激活输出的标准差约为0.06。虽然比较小,至少还没有完全消失。
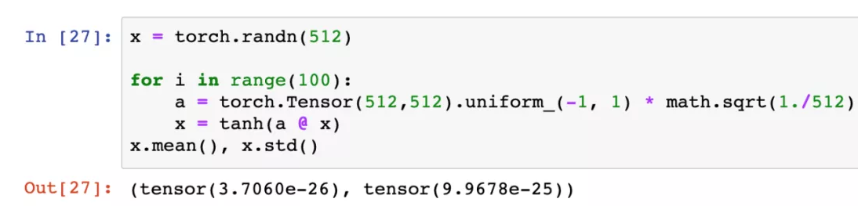
回顾曾经,在2010年时,我们的权重初始化方法比现在更加传统。当Xavier Glorot Yoshua Bengio发表了具有里程碑意义的论文题为Understanding the difficulty of training deep feedforward neural networks,他们实验中的初始化权重为(-1,1)的均匀分布,然后乘以1/$\sqrt{n}$。事实证明,这样的方法并不可取,梯度几乎完全消失了。
这种糟糕的性能实际上促使Glorot和Bengio提出了他们自己的权重初始化策略,他们在论文中称之为“normalized initialization”,现在通常称为“Xavier初始化”。
4.Kaiming初始化
没时间整理了,简单说一下吧,这里考虑的是Relu激活函数,发现一层之后的偏差约为$\sqrt{n}/\sqrt{2}$。因此Kaiming初始化就是先取标准正态分布进行初始化,然后除以$\sqrt{n}/\sqrt{2}$的收缩比例,主要针对的是Relu初始化。初始偏置置为0。比起Xavier初始化,这个方法很好解决了Relu激活函数带来的梯度消失问题。
PART II 优化方法
1.SGD
回顾三种梯度下降的公式:
1.Batch Gradient Descent
问题:
容易陷入局部最优
遍历整个数据集才走一步,太慢,且耗内存
不能投入新数据实时更新模型
2.Stochastic gradient descent
问题:
每一步都要计算loss、梯度,冗余计算量过多
不易收敛,易震荡
3.Mini-batch gradient descent
优点:
减少了参数更新次数,且更新较稳定
可以在batch内并行计算提高速度
现在SGD一般指mini-batch gradient descent。SGD仍有很多局限,如:
1.由于SGD更新的参数仅由学习率和当前batch的梯度决定,模型很容易陷入次优点和鞍点
2.选择步长困难,过小收敛慢,过大不易收敛。即使使用随着epoch数的增长减小学习率的方式,也只能预先定义好,不能依据当前Batch的特点让学习率动态衰减
3.所有参数都有同样的学习率,不能自适应地调节
2.Momentum(动量)
首先针对以上局限中的第一点和第二点,即收敛方面的问题提出了动量的概念。
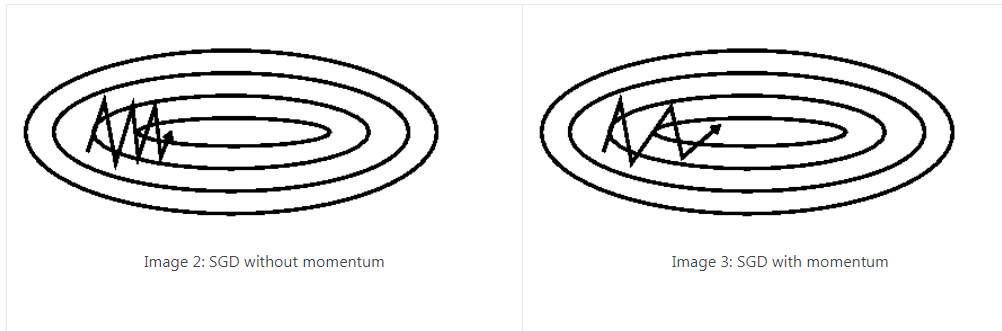 SGD在ravine的情况下容易被困住,即曲面的一个方向比另一个方向更陡,这时SGD会发生震荡而迟迟不能接近极小值。
SGD在ravine的情况下容易被困住,即曲面的一个方向比另一个方向更陡,这时SGD会发生震荡而迟迟不能接近极小值。
加入的这一项,即$\gamma v_{t-1}$($\gamma$实际使用中取值一般为0.9),可以使得梯度方向不变的维度上速度变快,梯度方向有所改变的维度上的更新速度变慢,这样就可以加快收敛并减小震荡。
同时,因为梯度的更新具有了一定“惯性”,也帮助了模型跨出局部最优点和鞍点。
缺点:这种情况相当于小球从山上滚下来时是在盲目地沿着坡滚,如果它能具备一些先知,例如快要上坡时,就知道需要减速了的话,适应性会更好。
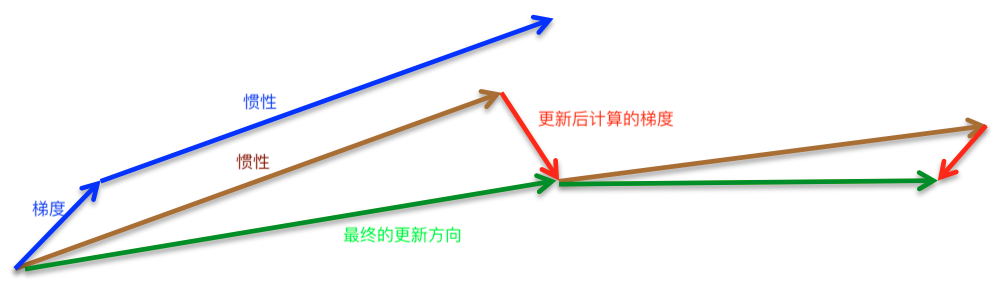
3.Nesterov Accelerated Gradient(NAG)
NAG针对Momentum的缺点做了一些改进。它在计算梯度时,不是按照当前位置计算梯度,而是按照未来的位置,即假设已经走完了惯性的这段路程来计算梯度。
 超参数:$\gamma$一般取值仍为0.9。
超参数:$\gamma$一般取值仍为0.9。
4.Adagrad
从这里开始,解决SGD的第三个问题:尝试对各个参数使用不同的学习率。
作为一种同样是基于梯度的优化方法,Adagrad对出现频繁的特征所对应的参数使用较小的更新速率,而对出现不频繁的特征对应的参数使用较大的更新速率,这意味着这是一种适合稀疏数据的方法。它曾被用于训练Glove词嵌入以及在youtube上识别猫。
现在把t时刻第i个参数的梯度写为
回顾标准SGD的参数更新公式为
在Adagrad中的参数更新公式为
其中$G_{t}$为对角矩阵,其中(i,i)位置的值为$\theta_{i}$从开始到时间t的梯度的平方和,$\epsilon$是防止分母为0的平滑项。
超参数:$\eta$一般选为0.1
优点:减少了学习率的手动调节
缺点:分母不断增加,直到学习率减小到无限小,这时模型不再会学到任何东西
5.Adadelta
Adadelta是为解决Adagrad的问题而产生,它将历史梯度的累积限制在一个固定大小内。它定义梯度平方的期望为
参数的更新公式变为
RMS即均方根。此外,该方法还将学习率$\eta$换成了RMS[$\Delta \theta$],这样就不用提前设置学习率了。即
超参数:$\gamma$一般选为0.9
6.RMSprop
Hinton提出的方法,参数的更新同Adadelta。它和Adadelta不同的地方就在于没有用上一步$\theta$变化率的均方根代替学习率。
超参数:建议设定$\gamma$为 0.9,学习率$\eta$为 0.001
7.Adam(Adaptive Moment Estimation)
Adam可看作是结合了Momentum和RMSprop的方法,它既存储过去的指数衰减的平方的平均值,也存储过去的指数衰减的平均值
在衰减率较低,即$\beta_{1}$和$\beta_{2}$接近1的情况下,如果$m_{t}$和$v_{t}$被初始化为0向量,在最初的一些步中它们会处于向0偏置的状态。因此做了偏差校正
梯度更新规则为
由表达式可以看出,对更新的步长计算,能够从梯度均值及梯度平方均值两个角度进行自适应地调节,而不是直接由当前梯度决定。
keras默认参数:lr=0.001,beta_1=0.9,beta_2=0.999,epsilon=1e-8
各方法的比较(参考图)
如何选择优化算法
1、如果数据是稀疏的,用自适应方法较好,如Adagrad, Adadelta, RMSprop, Adam。
2、RMSprop, Adadelta, Adam 在很多情况下的效果相似。
3、SGD通常训练时间更长,但是在好的初始化和学习率调度方案的情况下,结果更可靠。因此很多论文至今仍使用SGD。
4、Adam在自适应方法中效果较好,如果需要更快的收敛,或者是训练更深更复杂的神经网络,可以直接使用。
为什么神经网络不采用二阶优化方法
优化SGD的其它手段
参考:
https://ruder.io/optimizing-gradient-descent/index.html#fn4
https://fyubang.com/2019/08/10/optimizer_sgd/
https://www.cnblogs.com/guoyaohua/p/8542554.html
https://blog.csdn.net/qq_23269761/article/details/80901411